项目基本情况
设备
我方:十个无人设备:3船+3机+3车+1潜航器(四类12型)
敌方设备:七个无人设备:3船+3机+1潜航器
模块
七个模块
自主决策 态势认知
算法分类github资源
无人协同
水面无人艇的协同作战问题 可以重点关注一下, 美赛的赛题, 和场景很像, 也有matlab代码

问题二:无人水面车辆集群协同作战
新一代人工智能技术和自主技术将迅速走向战场,这将催生新的作战力量,颠覆传统战争模式。未来的战争将是一场明智的战争。作为智能作战的一种重要形式,无人水面车辆集群作战正在兴起。通过协同侦察、协同探测、协同跟踪、协同攻击、协同拦截等多种复杂作战任务共同完成。
研究了海平面上红蓝两色无人侦察机机群的协同对抗问题。作为进攻方,蓝队希望突破红队的拦截,顺利抵达目的地,开展军事行动;红队希望在一定区域内完成对蓝队的拦截,防止蓝方突围。在这种情况下讨论的对抗区域是一个矩形区域(如图1所示)ABCD。攻击深度(BC之间的距离)为L=10km。蓝队的航迹不能跨越AD、BC两侧,即攻击通道(穿透通道)带宽有限制。信道之间的距离(即带宽)AB记录为M。蓝色USV的速度为V_e=25m/s。最小转弯半径为R_e=100m。红色USV的速度为V_P=20m/s。最小转弯半径为R_P=80m。红色和蓝色USV的速度被认为是恒定的。运动方向可以根据机动策略的需要随时改变,但受转弯半径的限制。双方的无人驾驶车都配备了探测装置和数据链,能够准确地检测出所有无人驾驶车辆(红色和蓝色)的实时位置。鉴于蓝色无人机在机动速度上的优势,红方考虑通过多个无人驾驶飞机的合作(即通过数量优势)来弥补其劣势性能,以提高其对抗效果。执行拦截任务的红方无人侦察机由无人侦察机舰载机携带到攻击阵地,然后根据对抗需要投放一定数量的无人侦察机,组成无人侦察机集群对抗蓝方无人侦察机。如图1所示,为了防止蓝色无人机的突防,红色侧由两个USV集群组成,分别由FY01和FY02运载火箭释放。每艘USV航母释放5艘USV。当蓝侧突防无人驾驶车与至少两辆无人驾驶车离红侧的距离小于R=100m时,认为红方已成功拦截蓝方突防无人驾驶车。同时,根据任务要求,蓝方无人机需要在700秒内越过边界CD,否则视为突防失败。双方都希望充分利用自身优势,通过运用最优机动策略来达到突防和拦截的目的。
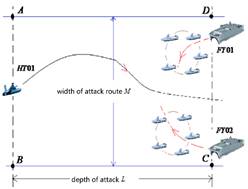
图1红队拦截蓝队示意图
红队无人机集群可根据实际需要以特定编队航行。如图2所示,红色USV集群采用其中一种编队。五架无人驾驶飞机的位置大致分布在一个圆圈上。任何两个相邻USV之间的间距相同。为了控制、通信和避免碰撞,红方任意两个无人机之间的距离应大于30m,每一个无人机与该集群中至少两个无人机的距离不大于100m,红色无人机载体与无人机集群中至少一个无人机的距离不超过2km。与蓝色突防无人机的距离应大于1公里。红色无人机运载器的速度不小于V_C=16m/s,转弯半径不小于500m,红色无人机和无人驾驶车辆的轨道不受边界ABCD的限制。
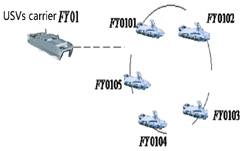
图2红队无人机航母发布的USV集群形成示意图
USVs承运人FY01发布的USV编号记录为FY01××。因此,图2中的五个USV编号分别记录为FY0101、FY0102、FY0103、FY0104、FY0105。USVs承运人FY02发布的USV编号记录为FY02××,依此类推。USVs群集中的usv在初始时刻均匀分布在一个圆上。
在实践中,USVs运营商建立USVs集群需要一定的时间。为了简化计算,这种情况下不考虑这个时间限制,可以看作是无人机集群的瞬时布局,并满足相关约束条件。对抗过程中,整个飞行不需要按照固定的队形,编队可以根据需要随时调整。
要求您的团队通过建立数学模型来研究以下问题:
问题1:如图3所示,在对峙开始时,红方的两个USV机群的圆周中心分别位于G_1和G_2,圆周半径为50 m,其中DG_1=2km,G_1 G_2=3km,CG_2=2km。请建立您的模型,分析蓝色无人机在ABCD矩形区域的位置,无论红色无人机采用何种追击策略,蓝色无人机总能采取适当的策略,避免红方拦截,实现成功突防。请讨论蓝色无人机的最佳突防策略。
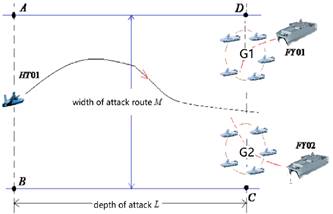
图3红队无人机集群初始中心位置
问题2:如图4所示,蓝色无人机在对抗开始时位于边界AB的中心。红方的两个无人机集群的圆周中心位于GΒ1和GΒ2。圆周半径为50m。G_1和G_2位于边界CD上。具体位置根据需要确定。
请建立您的模型,并分析是否存在信道带宽M的下限M\u min。当实际信道带宽M大于M峈min时,蓝色无人机可以突破红色无人机集群的拦截。并且,请给出这种情况下蓝色无人机最短时间的突防策略。
请建立您的模型并分析是否存在信道带宽M的上限M_max。当实际信道带宽M小于M峎max时,红色USV集群可以拦截蓝色USV。在这种情况下,请给出红色USV集群的拦截策略。
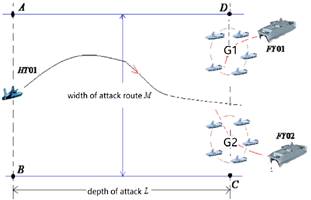
图4无人机机群初始位置示意图
问题3:每艘航母可分两次投放10架无人侦察机,组成两个无人侦察机机群进行拦截。每个集群中的USV数量不少于3个。每一次,无人机集群的初始形成如图2所示。载体与圆心的距离为200m,无人机机群的形成可根据需要进行调整,但需要相应的间距约束。如图5所示,对抗开始时,蓝色USV位于边界AB的中心,信道带宽M=10km。红色的两个USV载具分别位于边界CD上的G_1和G_2点,并开始释放第一波USV集群。USV集群中心和USV载体的具体位置可根据需要确定。当无人机舰载机真正缓解第二波无人机集群时,必须保证舰载机和第一波无人机集群满足间距约束。
请讨论两次释放无人机的数量,每辆红色航母第二次释放的时间和位置,以及第二次释放的无人机集群的中心位置,以达到最佳拦截效果。
请建立您的模型并分析是否存在信道带宽M的上限M_max。当实际信道带宽M小于M max时,无论蓝色USV使用何种穿透策略,红色USV集群都可以在ABCD矩形区域拦截蓝色USV。在这种情况下,请给出红色USV集群的拦截策略。
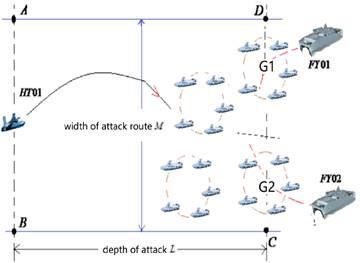
图5红队USV航母发射两个USV集群拦截图
你的解决方案总页数不超过22页应包括:•一页摘要表。
•目录。
•您的完整解决方案。
•参考列表。
注意:您提交的所有方面都在22页以内(摘要表、目录、参考列表),但附录不计算在内。
航迹预测
威胁评估

行动控制

任务规划
效能评估和态势生成没有仓库
算法邓总结

其他
模型系统分为两个模块
- 训练系统
- 推理系统
整个和算法相关的话, 有流程:
- 意图理解
- 训练模型
- 推理计算
- 返回结果
老师总结:
- 推荐调研然后讨论
- 摸清算法库和知识库构建
欢迎在评论区中进行批评指正,转载请注明来源,如涉及侵权,请联系作者删除。

